

Toutes les actualités

SPECTRA : France 2030 soutient le développement d’un calculateur de mission avec IA embarquée et capteur RF pour la surveillance maritime par drone aérien
Sherpa Engineering participe au projet SPECTRA, soutenu par France 2030, en collaboration avec M3 SYSTEMS, SDR Technologies, Embrya et Tilt GNSS afin de développer un module intelligent destiné à détecter et localiser les communications radio dans le cadre de la...

ACTIA et SHERPA Engineering : Un partenariat au service de la robotique agricole de nouvelle génération
ACTIA et SHERPA Engineering annoncent un partenariat stratégique visant à intégrer la brique technologique de navigation autonome de SHERPA sur le calculateur haute performance HPC ACTIA. Cette collaboration vise à développer une solution unique sur le marché : un HPC...

Cap sur l’agriculture de demain ! 🌾
Nous sommes fiers de notre partenariat avec l’INRAE au sein de l’Agro Technopole, autour de la robotique agricole.
Découvrez en vidéo notre vision commune pour transformer durablement l’industrie agricole grâce à l’innovation et à la robotique 🤖

Le projet STAIRS : une nouvelle étape vers une agriculture durable et résiliente
Le projet STAIRS vise à accélérer la robotisation durable de l’agriculture. Il développe des standards, outils et méthodologies pour des robots efficaces, interopérables et écologiquement responsables. SHERPA Engineering y contribue via l’analyse environnementale et la perception terrain.
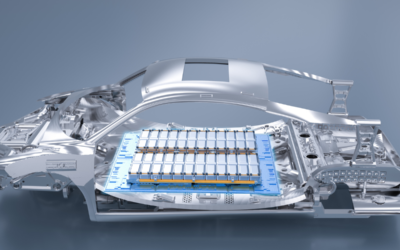
IBIS : Une révolution dans l’architecture des batteries pour véhicules électriques et stockage stationnaire
IBIS (Intelligent Battery Integrated System) est un projet de recherche collaboratif mené en France, réunissant des acteurs industriels et académiques, Stellantis, Saft (Groupe Total Energies), E2CAD, SHERPA Engineering, ainsi que plusieurs laboratoires du CNRS (GeePs, SATIE, LEPMI) et l’Institut Lafayette. Ce projet est financé par le Plan France 2030, piloté par l’ADEME.

Les défis de la simulation 0D/1D dans le monde automobile
Dans un secteur automobile en constante évolution, la simulation est un outil essentiel pour la conception, l'évaluation et l'optimisation des systèmes complexes. Parmi les diverses méthodologies, la simulation 0D/1D se démarque par sa vitesse et son efficacité en...

SHERPA Engineering présent à l’Hyvolution
L'hydrogène se trouve à un tournant décisif de son développement, offrant des opportunités prometteuses qui se retrouve avec de nos nombreux obstacles. Le salon Hyvolution Paris, rendez-vous majeur dans le secteur de l'hydrogène qui rassemble les principaux acteurs...

SHERPA Engineering concepteur du nouveau traineau du père Noël !
SHERPA Engineering s’associe au Père Noël pour créer un traîneau écologique et performant grâce à nos outils de simulation avancés. Confort assuré à -40°C avec un système HVAC innovant, piles à combustible pour une propulsion verte et un transport optimisé pour les cadeaux. Joyeux Noël et que l’innovation illumine vos fêtes !

O-AMIE : Ingénierie des systèmes et analyse du cycle de vie au service de l’agroécologie
Nous avons le plaisir de partager les résultats d’une recherche innovante sur l’éco-conception des pratiques agricoles via un outil : O-AMIE (Outil d’Analyse et de Management des Impacts Environnementaux). Développé pour répondre aux défis environnementaux de...

SHERPA Engineering Mena et SUP’COM s’associent !
SHERPA ENGINEERING MENA, Filiale en Tunisie du Groupe SHERPA Engineering leader en ingénierie des systèmes dans les secteurs de l'automobile, de l'aéronautique et de l'Industrie, et SUP'COM École d’ingénieurs en Télécommunication, sont fiers d'annoncer la signature...
Vous pourriez être aussi intéressé par

Qui sommes-nous ?

Nos domaines d’expertise

Nous rejoindre